Build into the robot
Note
For this guide we will assume that you have an SSH connection to the robot and that it also has an internet connection.
Connect to the robot
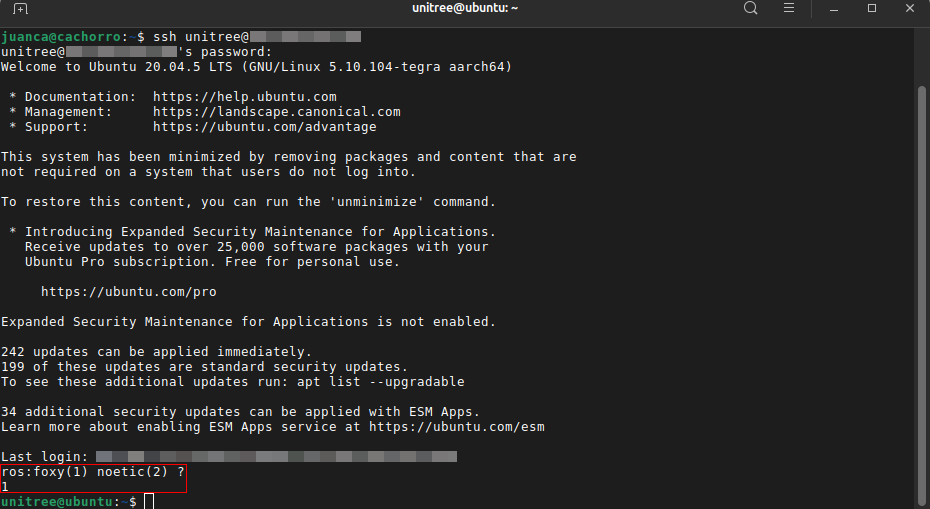
First we will establish a connection with the robot via ssh
ssh unitree@<robot-ip>
Afterwards, you’ll see that a connection has been established, and at startup, you’ll have to choose which version of ROS you’re going to use. Click option 1, choosing ROS 2 Foxy.
Build Go2 Robot packages
First we are going to prepare our workspace where we are going to add the necessary packages
cd ~/cyclonedds_ws/src
wget -qO- https://raw.githubusercontent.com/Unitree-Go2-Robot/go2_robot/refs/heads/humble/dependencies.repos | vcs import .
Note
The cyclonedds_ws workspace should already be created on your robot. If not, please create it with mkdir -p ~/cyclonedds_ws/src
Installs all the necessary dependencies to build the packages
cd ~/cyclonedds_ws
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src -r -y
Finally, build the packages
colcon build --symlink-install
source ~/cyclonedds_ws/install/setup.bash